From September 22 to October 13, 2014, the NATO Research Vessel Alliance is conducting the Multinational AutoNomy Experiment (MANEX ‘14) along the Ligurian coast to demonstrate the advantages of mapping the seabed using autonomous vehicles.
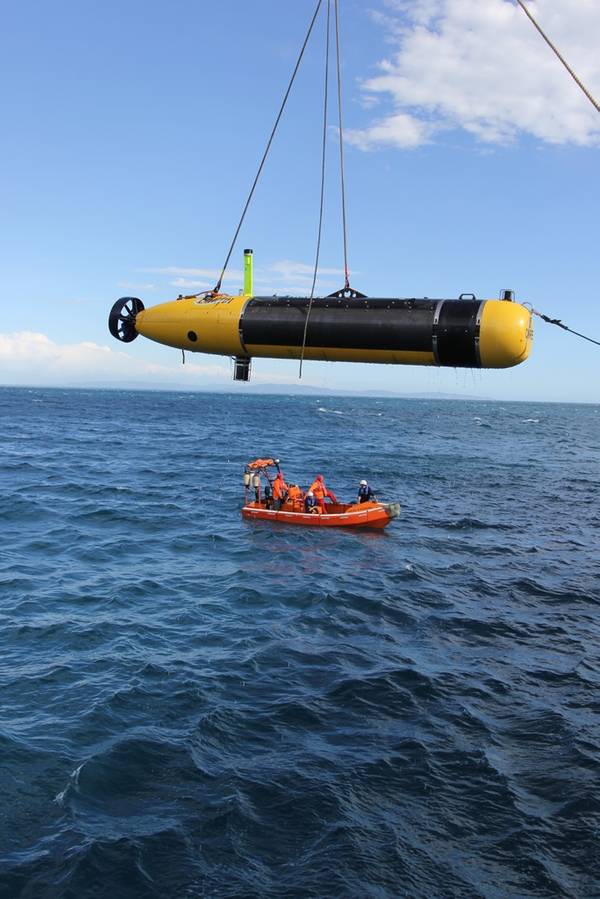
Throughout the experiment, multiple autonomous underwater vehicles (AUVs) equipped with modern sensors relevant to NATO minehunting missions are being employed in the Ligurian Sea along the Italian coast between Framura and Bonassola to collect data that will allow NATO researchers to advance the area of seabed mapping using autonomous vehicles, mainly for mine countermeasures applications. Improved capabilities in seabed mapping can also lead to positive advancements in other fields such as support for environmental and archeological surveys.
Onboard the NATO Research Vessel Alliance, operated by the NATO Centre for Maritime Research and Experimentation (CMRE), part of the NATO Science and Technology Organization, scientists and engineers from eight institutions and ten nations are exercising state-of-the-art high resolution underwater acoustic imaging systems and autonomous vehicle behaviors. The use of robots improves safety by removing the need for navy personnel to operate in a potentially dangerous area like a minefield.
CMRE has a world-leading expertise in autonomous mine countermeasures and seabed mapping. For many years, the center has worked to transform the way mine countermeasures are conducted, from a post-Cold War approach that focuses on post-operations clearance using surface ships, to a quickly deployable, autonomous system-of-systems that is scalable, cost effective, and minimizes risk to personnel. This includes developing techniques for handling the large data rates associated with modern high-resolution sonar, and developing AUV systems that can make adjustments to pre-planned routes based on data that are gathered in situ.
During MANEX ‘14, CMRE capabilities, AUVs and sensors will be challenged in a very complex environment where the sea bottom characteristics vary over the range of flat sand, seabed ripples and heavy clutter. In particular, so-called Automatic Target Recognition (ATR) algorithms, computer programs used to find and identify underwater objects in sonar imagery, will be stressed in such a high clutter and complex environment with the objective of maximizing detection rates whilst minimizing false alarms. The data collected will greatly help to enhance the quality of the scientific research conducted by the Alliance in this field. Overall, the multinational aspect of the MANEX ‘14 trial will also allow NATO and Nations to gain experience in how autonomous systems can be used in joint mine countermeasures missions.
The MANEX ’14 sea trial is funded by the Allied Command Transformation (ACT).












