Greensea introduces a new hull crawler that easily attaches a Remotely Operated Vehicle (ROV) to a ship hull without magnetics, allowing the operator to “drive” the ROV and payloads over the hull. Initial hull crawlers are designed to work exclusively with the VideoRay Mission Specialist Defender ROV.
The hull crawler represents a milestone in Greensea’s hull robotics program, which is advancing navigation and localization capabilities for a fully autonomous robotic hull inspection and proactive in-water cleaning solution. “VideoRay is a valued Greensea partner with a dynamic and powerful ROV. We are pleased to be working with VideoRay to offer early models of our hull crawling technology,” said Ben Kinnaman, CEO of Greensea. “It’s a natural extension of the work we’ve done together to provide the miniature ROV industry with an easy-to-use, highly-capable robotic system.”
VideoRay and Greensea expect early adopters of the technology will use the Defender with the Greensea hull crawling attachment for hull inspection, surveying, non-destructive testing, and explosive ordnance disposal purposes.
“When VideoRay created our new Mission Specialist technology, we used a modular, open-architecture in order to allow the integration of our technology into a wide range of underwater tasks and missions,” said Scott Bentley, CEO of VideoRay. “This is one of several examples where our tools are by far the best available to deliver payloads and tool kits designed to solve difficult underwater problems. Our close integration with Greensea means that each of us can provide the other with best-in-class capabilities, resulting in an extremely powerful and unique product.”
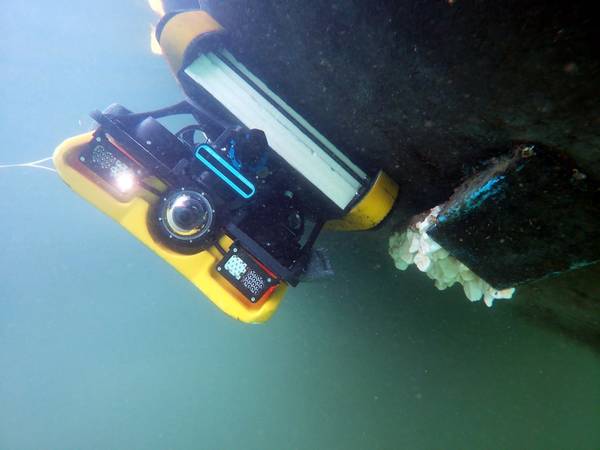
 Image: Greensea
Image: Greensea
“The stability afforded by a crawler attached to a hull will enable inspection and intervention tasks with a degree of precision not possible with a small free-flying ROV,” said Karl Lander, Greensea Program Manager. “Providing a stable base platform for a camera, laser imaging scanner, or manipulator will greatly enhance accuracy, and ultimately safety, by enabling small robotic systems to perform work previously requiring a diver.”
In 2019, Greensea was awarded a Phase 2 R&D program through the U.S. Navy to develop a highly accurate navigation and autonomy solution for ship hull robots for the purposes of supporting autonomous proactive in-water cleaning. This program will utilize several of Greensea’s core navigation and autonomy technologies including their work with inertial navigation systems in ferrous environments and feature-based localization. The hull crawler technology will provide the delivery mechanism for the advanced software being developed in the Phase II program.













