The Universal Acoustic Range and Processor (UARP) was developed to address the need for a reliable low cost method to provide harbor surveillance of surface and subsurface vessels. This turn-key system employs an ultra thin line array and passive sonar processor for the detection and tracking of surface ships and underwater vehicles.
The signal processing is based on the next generation of Array Systems Computing Inc.’s (Array) SAPPS sonar processor architecture, which is currently in operational use by the German and Swedish Royal Navies. The real-time sonar analysis provides broadband and narrowband analysis on the beamformed data.
Key Features
Complete turn-key portable acoustic range and sonar processor designed for harbor surveillance and monitoring Integrated MMI and real time SONAR analysis including:
Extremely low cost of ownership
The UARP is available in two configurations:
(1) As a portable towed array system that can be streamed from all but the smallest harbor patrol vessels, or
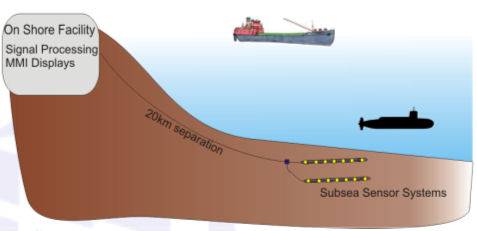
(2) As a bottom mounted array for fixed harbor surveillance.
Towed Array Configuration
In this configuration, the UARP provides an excellent tradeoff between long range detection, enhanced target classification, and total cost of ownership/maintainability. The lightweight modularity of the system allows the array and signal processor to be easily transferred between patrol crafts with the proper winch system. This can be extremely useful if it becomes necessary to quickly move assets to a particular location. Also, since the array is designed for shoreline monitoring or harbor support, the array length is shorter than conventional systems. This design overcomes a major limitation of conventional towed arrays that beamforming cannot be carried out when the ship is maneuvering - which can result in downtimes as great as 50 percent. To help account for ownship maneuvers, the UARP uses a water pulley model to account for array deformation and to keep beamforming performance high.
Bottom Mounted Configuration
For the bottom mounted configuration, the subsea sensors are mounted to the sea floor via a protective enclosure and connect to a subsea Data Acquisition System (DAS). It is possible to install multiple sensor arrays offering the benefit of maximum coverage as well as the ability to triangulate target positions. There is also an optional Acoustic Doppler Current Profiler (ADCP) sensor which reports the water current velocities passing over the system. A fiber optic connection transfers the digital data from the DAS to the shore based facility where the signal processing and displays are located.
Acoustic Displays
The shore processing facility houses the processor and the displays. The processor runs on standard PC COTS devices and uses an open architecture platform with well-defined open standard interfaces. Array provides a customizable display layout so that it may be configured to best match a user’s current MMI requirements. The signal processing algorithms proposed here are the same ones that have been proven to be effective in handling sonar systems for the Swedish Royal Navy’s Gotland and Germany’s U212 submarines. Specifically the operator workstations will provide:
Benefits












